
Gavin Jared Bala
The classical notion of a regular polyhedron is:
- A finite solid figure,
- bounded by identical regular polygonal faces,
- with all vertices alike (i.e. surrounded by the same number of faces).
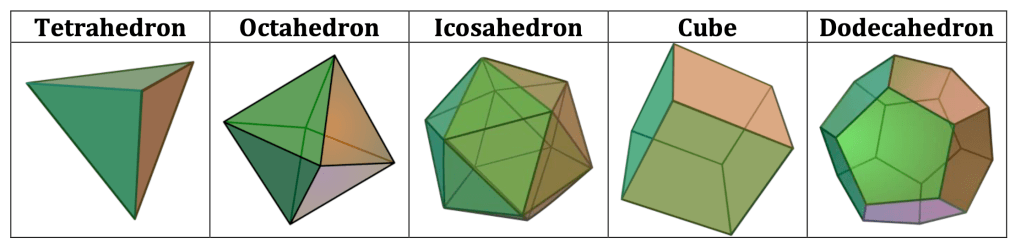
A familiar example is the cube, bounded by square faces meeting three to a corner.
This is a natural generalisation to 3D of the definition of a regular polygon:
- A finite plane figure,
- bounded by identical line segments,
- with all vertices alike (which can be measured by their angles).
For example, a square has four equal sides and four equal right angles.
One of the most famous theorems of solid geometry is that there are only five regular polyhedra.
The standard proof is ancient! It forms part of Book XIII, Proposition 18 of Euclid’s magnum opus, The Elements (written c. 300 BC).
So let’s now consider how each regular polygon can be used to make regular polyhedra.

A full circle is 360°, and a corner must have less than that if it is to fold up into the third dimension.
Equilateral triangles have 60° angles, so they can fit three, four, or five at a corner; but not six, as then there would be no space left. Squares have 90° angles and pentagons 108°; so they can only fit three at a vertex. Three hexagons, with 120° angles, completely fill up a vertex; higher polygons have even greater angles, so trying to use them is futile.
Simply taking a bunch of polygons and trying to connect them is enough to confirm that all these cases are possible. They correspond respectively to the tetrahedron, octahedron, icosahedron, cube, and dodecahedron.
And that was the story as it stood for millennia. However, overlooked by everyone, it had a flaw!
When analysing cases, it’s not enough to check that each case can be fulfilled. We have to also check how many ways we can fulfil that case.
So we made a mistake when we assumed that we had covered every regular polygon. Certainly, we covered one kind of regular pentagon: the convex kind with 108° angles.
But a five-pointed star, or pentagram, has five equal 36° angles and five equal sides. This is a second kind of regular pentagon!
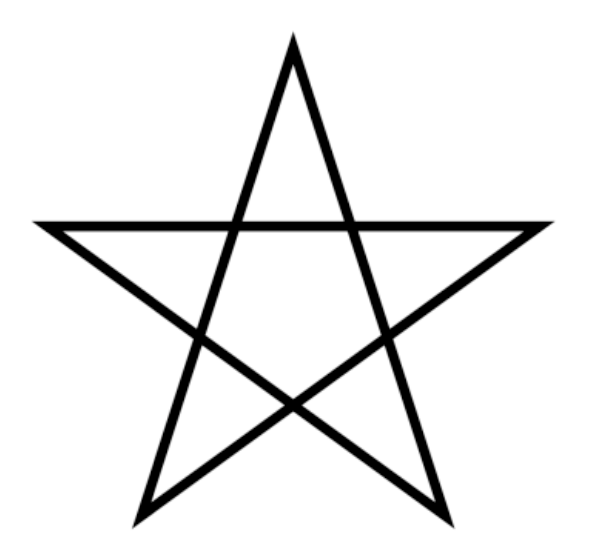
Notice that the regular pentagram has a regular pentagon in its centre. This shows how these regular stars naturally come from the process of stellation, or extending the sides of regular polygons.
Let’s number the sides of a regular pentagon as 12345 in sequence. Side 3 already meets sides 2 and 4. If we extend all sides symmetrically, then side 3 extends to meet the extended sides 1 and 5, giving a regular pentagram.
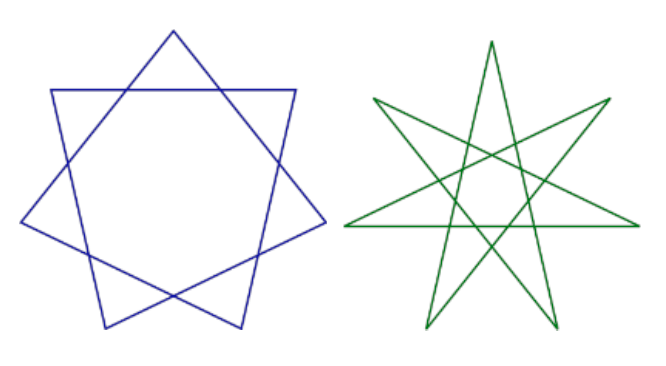
Higher polygons can have multiple stellations. If we apply this to a heptagon, then we have two stellations. Numbering the sides 1234567 in sequence, side 4 already meets sides 3 and 5. If we extend it further, it will meet the extended sides 2 and 6; and if we extend it still further, it will meet the extended sides 1 and 7. There the process stops, because there is nothing else to meet. The successive stages are visible below.
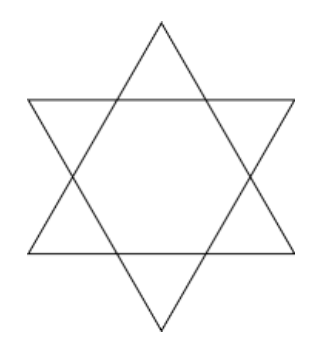
Not all stellations create a single polygon. Nonadjacent sides of a hexagon are at 60° angles, which are the angles between two sides of an equilateral triangle. So if we insist on stellating the hexagon, we don’t get a new polygon. We get the Star of David: it splits into two triangular circuits.
But we do get all the regular polygons as stellations of convex ones. An n-pointed regular star polygon has n edges, so its core must have at most n edges. But regularity implies all corners look alike and in particular that the star has n-fold rotation symmetry. A symmetry of the star is a symmetry of the core, so the core has at most n sides, yet has n-fold rotation symmetry. It must thus be a regular n-gon.
It is important to stress that the extraneous intersections of non-adjacent edges are not vertices. A vertex is simply where two adjacent sides intersect. If the sides are not adjacent, then their intersection is not a vertex! It is simply an “accidental” intersection.
This thinking is justified by topology (colourfully “rubber-sheet geometry”). Here we don’t so much care about the exact locations of things, but only on things that are preserved when we continuously deform the shape.
Seen this way, the important things about a polygon are really just how each side links to the next one, finally forming a loop. If we only consider the edges, a pentagram and a pentagon are different realisations of the same thing. They both have five vertices and five edges in a cycle.
The fact that a side may cross another one somewhere else really doesn’t matter, because we can simply pull them away from each other. Indeed, if we deform a pentagon enough, we can turn it into a pentagram!
The German mathematician and astronomer Johannes Kepler (1571–1630) realised that we can use regular star-polygons as faces of regular star-polyhedra! The possibilities that arise from this were first fully examined by the French mathematician Louis Poinsot (1777–1859). Together, this led to the discovery of four new regular polyhedra that in honour of them are called the Kepler-Poinsot solids.
But how do we obtain them, and perhaps more importantly prove that they are the only ones? We will follow the route of the great French mathematician Augustin-Louis Cauchy (1789–1857).
The obvious way, by dimensional analogy, is to try stellating regular polyhedra. We can do this either by extending faces or by extending edges. The latter is only relevant for the dodecahedron, as while there is only one kind of regular triangle and square, but there are two kinds of regular pentagon.
Before we perform stellation, an n-gonal face meets n other faces, along each of its sides, that lie at a common angle to it by symmetry. Because the stellation must preserve symmetry, after the face is extended, it must again meet n new faces along its sides that still lie at another common angle to it. So we need to examine the structures of the Platonic solids just as we did for the structures of the pentagon and heptagon.
The tetrahedron can’t be stellated, as all of its faces are already adjacent, and there is no way for them to meet again.
The cube encounters the same problem, as nonadjacent faces are parallel.
The octahedron has a more interesting structure. Suppose we single out one face to be on the top. Then we have split the octahedron into four “layers”:
- the top face;
- a belt of three faces, already adjacent;
- another belt of three faces, adjacent to the parallel face on the bottom;
- the parallel face on the bottom.
So the octahedron can be stellated. Extend each face until it meets the three faces adjacent to its opposite one: these lie at the same angles to the original, and a symmetric extension of an equilateral triangle will thus hit them all. Unfortunately, the angles they meet at are the angles between adjacent faces of a tetrahedron. So this only gives the 3D version of the Star of David: two interpenetrating tetrahedra.
The dodecahedron has a similar structure to the octahedron. Taking one face on top, we have:
- the top face;
- a belt of five faces, already adjacent;
- another belt of five faces, adjacent to the parallel face on the bottom;
- the parallel face on the bottom itself.
But we now have two opportunities for each of the admissible (non-parallel) cases, because there are two kinds of pentagon, whereas there was only one kind of triangle.
If we stellate each of its pentagons into a pentagram, then they all meet at the new vertices. This produces the regular small stellated dodecahedron. The faces are regular, and the vertices are all surrounded alike, and therefore this is a sixth regular polyhedron made from twelve pentagrams meeting five at a corner. Each face still meets the five that were originally next to it.
We can see the original dodecahedron buried inside, just like we can see the original pentagon buried inside a pentagram. This is present in the other dodecahedron stellations as well, but less obviously.
If we replace each of the pentagrams of the small stellated dodecahedron by the pentagon with the same vertices, then we get another stellation that comes from extending the faces rather than the edges of the original dodecahedron, until it meets the five neighbours of its opposite face, which lie at the same angle to it. This seventh regular polyhedron is called the great dodecahedron.
It is made of twelve pentagons, five to a corner. But the pentagons are joined so that they wrap twice around a vertex, just like the edges of a pentagram are joined so that they wrap twice around the centre.
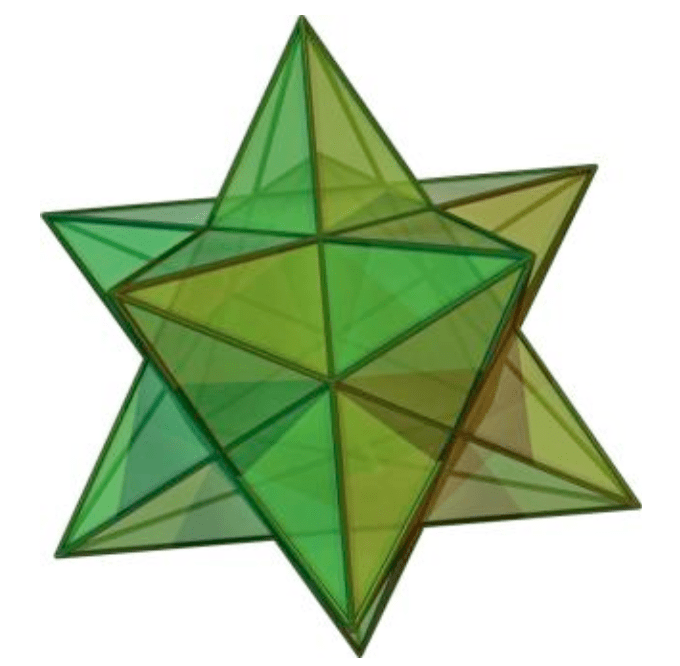
We can stellate once more, as the pentagons of the great dodecahedron are themselves amenable to stellation. If we extend them into pentagrams, we form an eighth regular polyhedron: the great stellated dodecahedron, with twelve pentagrams meeting three to a corner.

As pentagons and pentagrams are combinatorially identical, the great stellated dodecahedron is combinatorially identical to the original dodecahedron, with twelve pentagons meeting three at a corner! We could consider them different avatars of the same abstract regular polyhedron.
This is the end of the road for stellating the dodecahedron. The last Kepler-Poinsot solid is instead a stellation of the icosahedron.
So let’s set an icosahedron with a face on top, and examine its structure. We have:
- the original face;
- three faces adjacent to it, with a shared side;
- six faces adjacent to it, but with only a shared vertex;
- six faces adjacent to the antipodal face by a shared vertex;
- three faces adjacent to the antipodal face by a shared side;
- the antipodal face itself.
However, it turns out that the third layer is angled to the top face at the angles of an octahedron, and the fourth layer at those of a tetrahedron, and therefore they give no new solids.
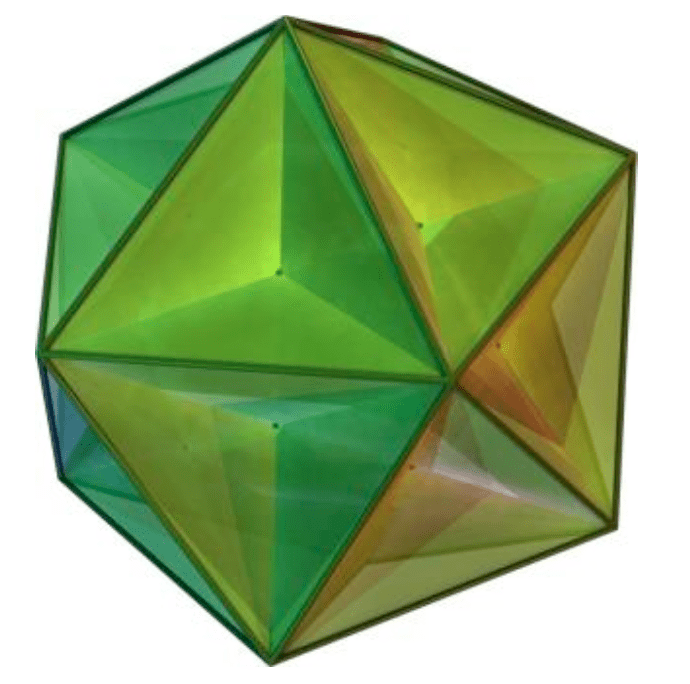
The only option left is to extend the faces to meet those of the fifth layer, adjacent to the antipodal face. This gives the final Kepler-Poinsot solid: the great icosahedron. Here twenty triangles meet five to a corner, making it combinatorially the same as the ordinary icosahedron; but they surround each vertex twice. The original icosahedron is buried deeply inside and is not easily apparent.

We must now ask a final question: how can we be sure that these are all the possible regular polyhedra?
By the exact same idea: we will prove that every regular star-polyhedron is the stellation of an ordinary regular polyhedron.
If we construct two identical regular star-polyhedra, their cores must be some convex polyhedron. If we bring the two star-polyhedra into coincidence by some symmetry, then we also bring their cores into coincidence by the same symmetry, and therefore the cores have all the same symmetries as the whole polyhedra. Therefore, the faces of the cores must be equal, the angles between them must be equal, and they must meet in the same number at each vertex!
This is almost the whole of the definition of a regular polyhedron; we just need to prove that the faces are indeed regular.
If the regular face of the original star-polyhedron had n-fold symmetry, then so would the face of its core. Therefore, the faces of the convex core must either be convex regular n-gons, or they must have at least 2n sides. But since n is at least 3, the latter case means that the core is a convex polyhedron whose faces all have at least six sides.
We need to invoke Euler’s polyhedron formula. Let the number of vertices of a convex polyhedron be V, the number of edges be E, and the number of faces be F. Then Euler’s polyhedron formula tells us that V – E + F = 2.
Consider the faces then meeting at a vertex of the core; there are at least three of them. Each face has at least six sides, so each face contributes at least six vertices. But since at least three faces meet at each vertex, this overcounts the vertices by at least a factor of three. Therefore 3V ≤ 6F, or V ≤ 2F.
However, each face has at least six edges, and exactly two faces meet at each edge. So 6F ≤ 2E, or 3F ≤ E.
Putting these together, V – E + F ≤ 2F – 3F + F = 0. But the core is convex, so it must be 2.
This is impossible!
Therefore, the faces of the core are convex regular n-gons, and hence the core is regular.
So, completing the list of regular polyhedra basically amounts to stellating each Platonic solid.
But we’ve already done that!
The vital statistics for the nine regular polyhedra are presented below:
| Vertices (V) | Edges (E) | Faces (F) | V – E + F | |
| Tetrahedron | 4 | 6 | 4 | 2 |
| Cube | 8 | 12 | 6 | 2 |
| Octahedron | 6 | 12 | 8 | 2 |
| Dodecahedron | 20 | 30 | 12 | 2 |
| Icosahedron | 12 | 30 | 20 | 2 |
| Small stellated dodecahedron | 12 | 30 | 12 | −6 |
| Great dodecahedron | 12 | 30 | 12 | −6 |
| Great stellated dodecahedron | 20 | 30 | 12 | 2 |
| Great icosahedron | 12 | 30 | 20 | 2 |
As we can see, Euler’s polyhedron formula holds for the convex polyhedra. But why does it only work for two of the starry ones?
Euler’s polyhedron formula in fact relates to a deep topological fact: the classification of different surfaces. The value V – E + F is 2 precisely when the polyhedron, viewed as a surface, can be continuously deformed into a sphere. This gives a combinatorial criterion to classify surfaces.
The Platonic solids are clearly topological spheres: imagine blowing them up like beach-balls.
The great stellated dodecahedron and great icosahedron are topological spheres, even if significantly warped, because they are combinatorially the same as the normal dodecahedron and icosahedron.
But for the small stellated dodecahedron and great dodecahedron, V – E + F is −6. They are not topological spheres. They constitute two avatars of a new regular polyhedron that, as a surface, is not continuously deformable into a sphere.
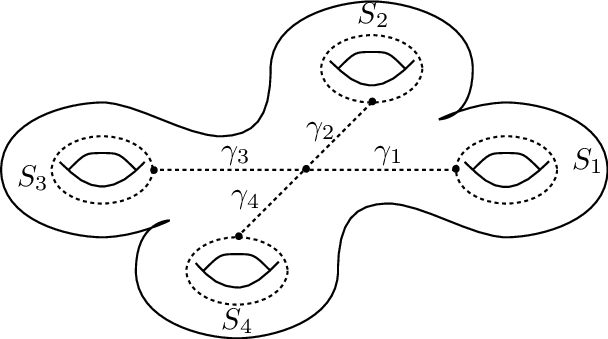
There are many such “generalised” regular polyhedra that are typically called regular maps. Their native land is not the sphere, as it is for the Platonic solids, but some other more exotic surface that they act as a regular tiling of. For the small stellated dodecahedron and great dodecahedron, it is a four-holed torus: a doughnut with four holes, or a sphere with four handles.
The small stellated dodecahedron and great dodecahedron are unusual in that they can be forced into ordinary space and still retain geometric regularity – though at the cost of painful self-intersections. Infinitely many others cannot!
There are also many subtleties associated with the use of pentagrams.
With an ordinary pentagon, one 360° trip around the edges goes once around the centre and takes us back where we started. But with a pentagram, we need to take a 720° trip, looping twice round the centre, before this happens.
This is reminiscent of the point of a cone, except that there, less than 360° is required to make a full turn, whereas here, more than 360° is needed. And indeed, here the problematic area can be localised to the centre, creating one “special point” in the middle of the pentagram that requires a 720° trip to make a full turn, whereas everywhere else requires only 360°.
And it is also reminiscent of passing between levels of a car park with ramps: if we perform a 360° circuit, but are confined to the car park, we will go up or down a level rather than return to the same place!
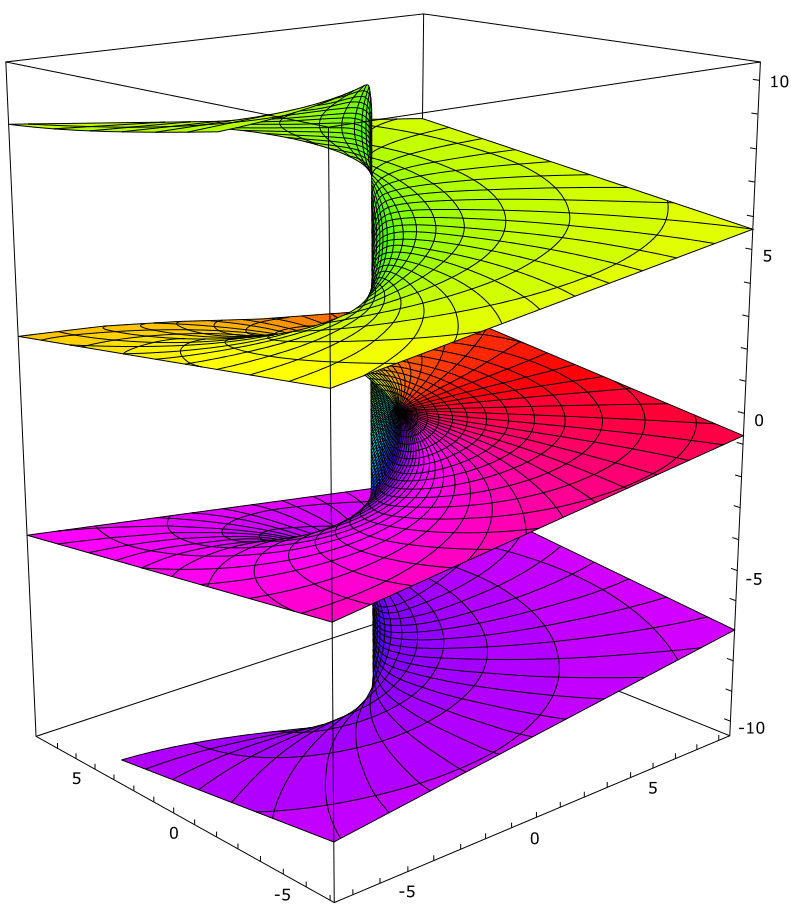
Such structures are pervasive in complex analysis. There are many functions, such as the square root and logarithm functions, that cannot be defined continuously across the whole complex plane. The natural domain for them is a set of complex planes glued together, so that passing around specific branch points moves us from one plane to another. Such constructions are called Riemann surfaces. The Kepler-Poinsot solids are also Riemann surfaces, gluing spheres rather than planes!
Further subtleties arise from considering the area of a regular pentagram! What is the “interior”?
If we simply try to divide the pentagram into triangles to determine the area, then it seems that somehow the central pentagon should count “twice over”. This is consistent with the idea that this region is circled twice.
And yet, boundaries of a polygon usually separate the inside from the outside. The arms of the pentagram are separated from the outside by one boundary, but another boundary separates them from the centre. Is this area then “outside” as well?
It turns out that both variants are legitimate! They differ in what surface we draw our pentagram on – so, topology again! A pentagram on a flat plane naturally has a double-wound core; but a pentagram on a Möbius band is naturally hollow.

Analogous and even trickier subtleties arise for the volumes and interiors of polyhedra, since they can have star-polygons as faces!
And from the nine regular polyhedra, we could likewise extend this discussion to four dimensions, giving no fewer than sixteen regular figures – six convex and ten starry! Although regular stars do not exist in dimensions higher than four, there is no shortage of less regular ones in any dimension.
Completing the set of nine regular polyhedra is certainly a beautiful exercise in pure geometry. But as we’ve seen, it also involves many subtleties and connects many branches of higher mathematics.
References
A.-L. Cauchy, “Recherches sur les polyèdres. Première partie,” Journal de l’École Polytechnique, Cahier 16, t. 9 (1813), pp. 68-74.
An English translation by Guy Inchbald may be found at http://www.steelpillow.com/polyhedra/StelFacet/Cauchy1813EngTrans.pdf
Inchbald, G. (2021, July 3). Morphic Polytopes. Steelpillow. http://www.steelpillow.com/polyhedra/morphic/morphic.html
Regular polygon images were taken from Wikipedia and are in the public domain.
Regular polyhedron images were made by user Cyp on Wikipedia using POV-Ray and licensed under the Creative Commons Attribution-Share Alike 3.0 Unported.
