
Gavin Jared Bala
One of the most omnipresent things in the Universe is symmetry: that is, the property of remaining the same under some kind of transformation.
Symmetry is inherent in nature at the large-scale: the laws of physics are the same wherever in the universe we go.
Symmetry is inherent in nature at the small-scale too. Individual atoms and molecules pack themselves in highly symmetric arrangements: the hexagonal structure of the snowflake reflects the actual symmetry of water molecules in the ice.
We value symmetry so much, that we not only see it in nature, but also insert it into our art: visual, musical, or literary. In short: it’s a big deal, so we’d better deeply understand it mathematically.
The clearest context in which symmetry arises is geometry. There, we can define a symmetry as a kind of rigid motion that leaves a shape looking the same. That is, we can turn it around and look at it from a different angle. Or we can look at it in a mirror, since that doesn’t change distances. Or we can do both! But we can’t pick up the shape and deform it, of course.
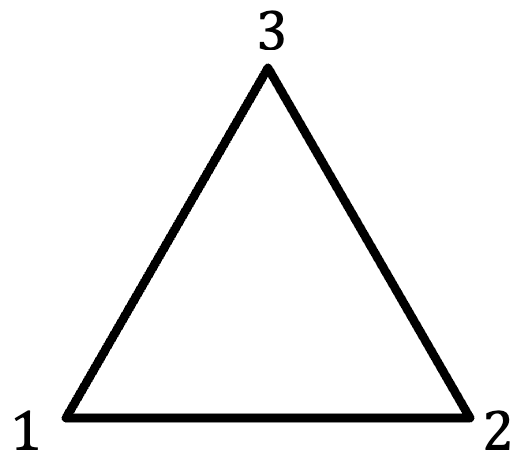
To understand what we mean by this, let’s count the symmetries of one of the simplest geometric shapes: the equilateral triangle. (For clarity, we’ve numbered the corners).
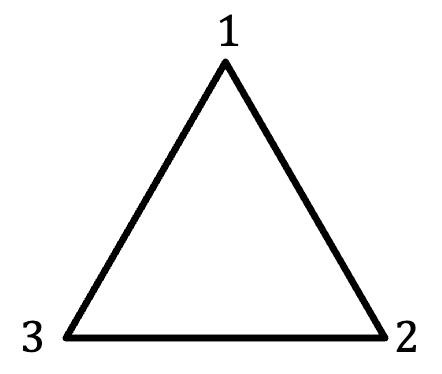
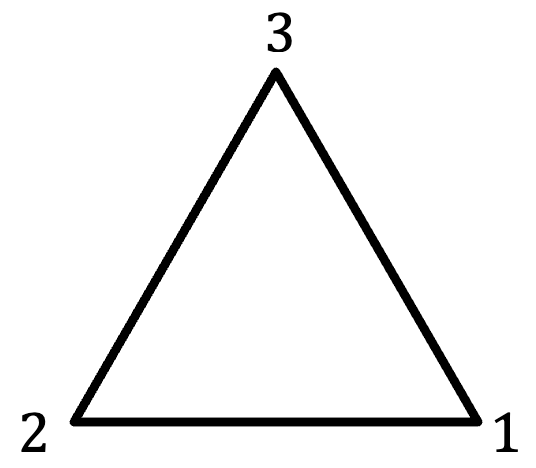
If we pick up the equilateral triangle and rotate it 120° (a third-turn) clockwise, the triangle looks the same. We once again have a horizontal side at the bottom, and it’s pointing up. Only the locations of the corners have changed: the corner we labelled 1 is now where the corner we labelled 2 used to be, for instance. Now we have:
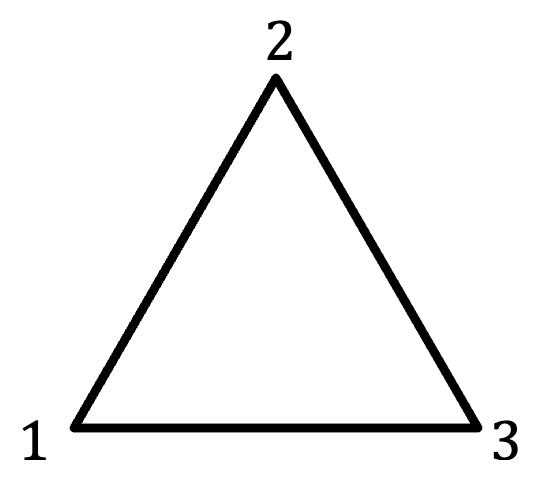
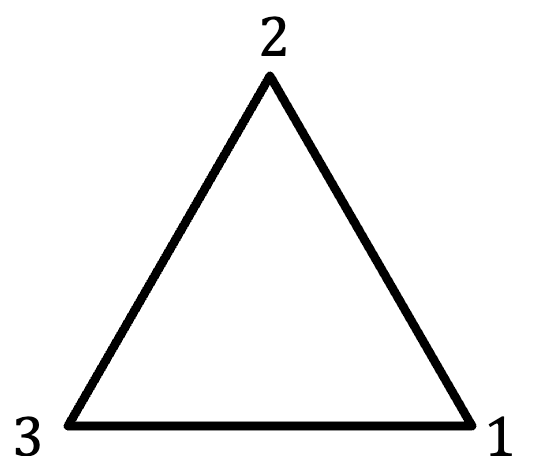
Similarly, we could rotate it 120° anticlockwise, in which case we would get:
So that’s two symmetries of the triangle.
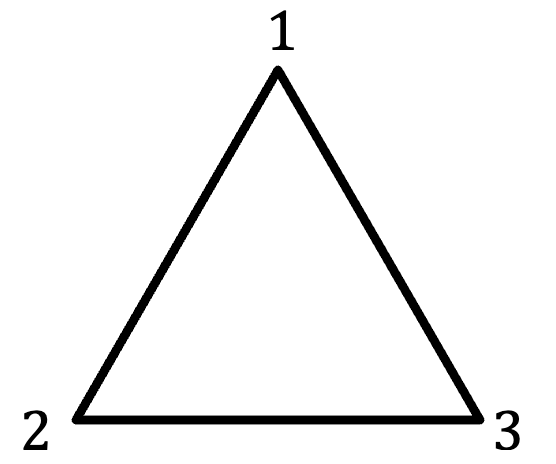
But we could also reflect it in a mirror. If we placed a vertical mirror passing through 1, then the corner at 1 is left alone, but corners 2 and 3 swap places:
Or we could do the same, reflecting in a mirror passing through corner 2:
Or corner 3:
Lastly, we could simply not do anything to the triangle, and leave it as it is! This is called the identity transformation.
Now, at this point, you may ask how do we know that these are the only symmetries? Well, once we specify where the corners are, we’ve defined the triangle, since its sides have to connect its corners. But if our transformation is a symmetry, the corners must end up in the same place as they originally were!
So, our only choices pertain to which corner ends up in which place.
We could choose any corner to end up on the top: 1, 2, or 3. Having chosen that, though, there are only two choices remaining for the bottom-left corner: the two we didn’t pick. And that fixes the last remaining one.
Since we had three choices for the first corner, and two for the second, this gives us precisely 3 × 2 = 6 possible symmetries. And it happened that all six of them are real symmetries.
We thus find that an equilateral triangle has six symmetries: one identity, two rotations, and three reflections.
Of course, this is unique to an equilateral triangle. For example, the 120° rotations are symmetries of the equilateral triangle, but they would not be symmetries of a square. Each shape has its own symmetries.
And for more complicated shapes, not every arrangement of the corners can be a real symmetry! To see why, number the corners of a square 1234 in clockwise order. The distance from corner 1 to corner 2 is just a side, and so is that from corner 1 to corner 4; but the distance from corner 1 to corner 3 is a diagonal. Hence, a symmetry could not make corner 1 adjacent to corner 3 on a side.
A closer look will reveal certain things about symmetries that hold in general.
Firstly, the identity is always a symmetry.
This is because the definition of a symmetry implies that the situation looks the same before and after you apply it. Naturally, if you don’t do anything, the situation remains unchanged!
Secondly, the composition of two symmetries is a symmetry. That is, if you do one symmetry, and then do another, the combined effect of those two symmetries is also a symmetry. For example, consider rotating the triangle first by 120° anticlockwise, and then by another 120° anticlockwise. We’ve rotated it cumulatively by 240° anticlockwise, which is another symmetry (it’s the same as rotating 120° clockwise).
This is also straightforward: the first symmetry leaves things looking the same, and so does the second, and so applying both will still leave things looking the same.
Thirdly and more subtly, a symmetry always has an inverse that is itself a symmetry.
An inverse of a transformation is another transform that undoes what you previously did. For example, if our transformation was rotating the triangle 120° anticlockwise, then its inverse would be rotating the triangle 120° clockwise.
To see why inverses are also symmetries, simply “reverse the arrow of time”. A symmetry makes the situation before you apply it the same as the situation after you apply it, and taking the inverse just swaps “before” and “after”!
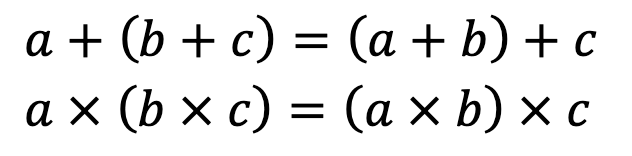
There is one more subtle property that might escape our attention: it is called associativity.
This term is usually used in arithmetic to indicate a certain fact about addition and multiplication, that the way you group these operations does not make a difference:
When you add or multiply two numbers, you make a new number. The analogy for symmetries, and transformations in general, is composition: you do one after another. If you perform a symmetry A, and then a symmetry B, then we’ve previously shown that the result is a symmetry, that we usually call A×B, or just AB for short.
This is quite analogous to what we do with multiplication. Multiplication, seen as an operation on the number line, is simply a stretching. If you stretch the number line by a factor of 2, then every number is moved to where its double used to be. Seen that way, multiplication is an example of composition: if you stretch the number line by a factor of 2, and then by a factor of 3, then you’ve stretched it in total by a factor of 2 times 3, which is 6.
So we have associativity of symmetries:

Or

It may look scary written like that, but just remember what it’s saying: “if you do A, and then B and C, the result is the same as if you did A and B, and then C”. That’s obvious!
But we should still include it as a rule, because it is something that we want, and that is not guaranteed by the other three properties (we’ll see that later).
A mathematical structure which has identity, closure, inverses, and associativity is called a group. Since symmetries naturally form groups, and symmetries are omnipresent, we definitely have a strong incentive to study groups!
We even give them fanciful names. The symmetry group of the equilateral triangle is called D6. This is because it has six elements (meaning that it contains six symmetries). The D stands for dihedral, a catch-all term for symmetry groups of regular polygons.
But the marvellous thing about distilling down properties in such a generalisation is that we get more than just that.
For instance, we’ve already alluded to addition and multiplication when discussing associativity, so let’s think about them. What can we say about the operation of adding integers?
Well, it certainly has an identity. If you add 0 to any number, it remains unchanged. So adding 0 is the command “do nothing”.
It also has inverses: indeed, that’s what the negative numbers were made for. The opposite of adding 2, for example, is adding −2.
It’s certainly associative, and when you add two integers, you get another integer.
That means that the set of whole numbers becomes a group if we agree that its operation is addition! It’s often labelled just Z, which is the general label for the set of whole numbers (it comes from German Zahlen, which means “numbers”). Its formal name is the infinite cyclic group (we’ll see where that comes from in future articles in the series).
However, if we take multiplication as the operation on the integers, then this isn’t a group. It has an identity (1), it’s associative, and when you multiply two integers, you get another one. But it lacks multiplicative inverses in general. (A few specific elements have them: 1 and −1. But 2, for example, does not.) And that’s still a problem even if you add in the fractions: it fixes the problem for 2 (whose inverse is now 1/2), but 0 still has no inverse. An inverse for 0 would have to multiply with 0 to get 1, which is impossible. A structure like this, which has all the properties of a group except for inverses being guaranteed, is called a monoid.
But let’s think about something that at first seems as far removed from symmetry as possible. Consider three people in a line; let’s think about how they can queue up.
At first glance, this seems to be about as far removed from symmetry as possible, since every possible arrangement is different.
But think about it this way. No matter how you arrange the people, the queue structure is intact. The queue has three slots: any of the three could take the first slot. That leaves two remaining who could both take the second slot. And then the last slot is fixed. So there are six possible arrangements (where have we heard that before?).
The natural operations here are to tell the people in the queue to swap!
Let’s start by numbering the people in the original form of the queue 123.
Firstly, we could tell the first two people to swap, giving 213.
Secondly, we could tell the last two people to swap, giving 132.
Thirdly, we could tell the first and the last person to swap, giving 321.
Or we could tell everybody to move one step back; the last person would then move to the front, giving 312.
Or everyone could move one step forward, moving the first person to the back, giving 231.
Lastly, we could leave them alone, retaining the arrangement 123.
In fact, this is the symmetry group of the equilateral triangle in disguise! Think about how it would look if the people’s spots were not in a straight queue, but marked out as an equilateral triangle on the floor.
Swapping two people and leaving the last one alone corresponds to a reflection; cycling the people corresponds to a rotation. Leaving them all alone corresponds, of course, to the identity!
In general, if we had more people, we could ask them to rearrange in any order we desired, even if it’s harder to describe. For example, if we had five people arranged in the order 12345, then telling them to rearrange as 53412 would be a valid symmetry (it leaves the queue structure intact).
The groups of arrangements are called permutation groups. The permutation group obtained from arranging n people in a queue is labelled Sn (the nth “symmetric group”).
By analysing the above situation, we’ve incidentally found the nontrivial fact that S3 (the symmetry group on 3 items) is the same group as D6 (the symmetry group of an equilateral triangle) – the first inkling we’ll have of group isomorphisms. Two groups are called isomorphic if they are really the “same group in disguise”, i.e. if there’s some clever relabelling or way to think about it that makes it clear that corresponding elements play analogous roles in their group.
It certainly looks like groups are even more omnipresent than we had thought. So we had better get some more understanding of them through small examples… see you for part II!

[…] recap from last time the formal definition of a group by general […]
LikeLike
[…] Part I […]
LikeLike